 |
Navigation
Home
Projects
Publications
Members
Causataxis: Coordinated Locomotion of Mobile Sensor Networks
Stationary wireless sensor networks (WSNs) fail to scale when the physical phenomena to be monitored may migrate through a very large region. Deploying mobile sensor networks (MSNs) alleviates this problem, as the self-configuring MSN can relocate to follow the phenomena of interest. However, a major challenge is to maximize the sensing coverage in an unknown, noisy, and dynamic sensing environment while minimizing the energy consumption. To address the challenges, we propose a new distributed algorithm, Causataxis that enables the MSN to relocate toward the interesting regions and adjust its shape and position as the sensing environment changes. Causataxis achieves scalable control of the MSN via a backbone-tree infrastructure maintained over clusterhead nodes, and achieves agility via localized cluster formation and dissolution.Faculty members:
- Dr. Murat Demirbas
- Dr. Chunming Qiao
Graduete student members:
- Seokhoon Yoon
- Onur Soysal
Applet: Causataxis Demo (Java 1.6 needed)
(Note: in this version of implemenation of Causataxis, multiple growingpoints are allowed in the initial expansion of the network in order to improve the speed)
Brief description of the Applet
- Applet main window
- Main window consists of the visual panel and control panel
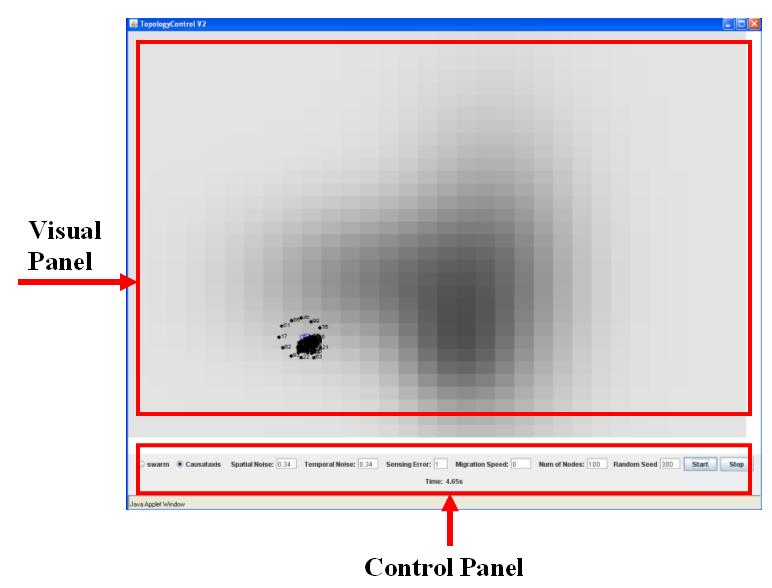
- Visual Panel
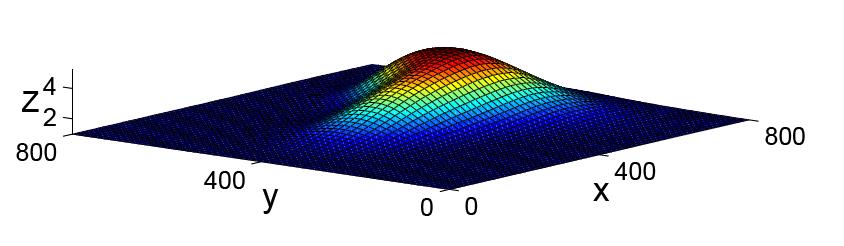
- Visual panel shows the area of interest, and the interest level values which are associated with the (x,y) coordinate
- The embedded interest values used for demo
- Visual panel also shows the current arrangement of mobile sensor nodes (which form a mobile sensor network), and locomotion of the mobile sensor networks
- Control Panel (Please refer to our technical
report for more detailed description of the parameters, noise
models, and simulation environment)
- Swarm and Causataxis radio button: Selection of the algorithm that will be used for the demo
- Spatial Noise and Temporal Noise: The spatial/temporal noise intense values that will be added to the area. The spatial noise is associated with the position (x; y) and the temporal noise is associated with time t.
- Range of spatial noise and temporal noise intense value: 0 - 1.6
- Sensing Error: the range coefficient of the sensor reading error.
- Range of value: 0 - 5 ( value 1 represents up to 50% of sensor reading error)
- Migration Speed: The migration speed of the phenomena of interest. The phenomena moves to south at the given speed
- Range of speed value: 0 - 5 (metere/sec)
- Number of Nodes: the number of mobile nodes used for the demo
- Random Seed: a random seed which randomizes the initial deployment of sensors, timeout periods, and others
- Start and Stop: start and stop the demo
- Time: shows the current simulation time
News
- Doctoral Student Murat Ali Bayir graduated, Congratulations Murat! May 2010.
- Crowd-Sourced Sensing and Collaboration Project got Google Research Award! Click here for details, March 2010.
- Asst. Prof. Dr. Demirbas got NSF Project Grant! Click here for details, September 2009.
- Doctoral Student Xuming Lu graduated, Congratulations Xuming! May 2009.
- Asst. Prof. Dr. Demirbas got Office of Naval Research Grant! Click here for details, April 2009.
- Two papers accepted to WOWMOM 2009 from Ubicomp Lab!, Click here for details, December 2008.
- Asst. Prof. Dr. Demirbas awarded NSF Career Award! Click here for details, January 2008.
© Copyright by UbiComp Lab., Dept. of Computer Science and Engineering, SUNY Buffalo.
All rights reserved.